Claas Xerion 5000
- Version II - Baujahr 2016 -

Technische Daten:
- Länge.....ca. 450 mm -
- Breite.....210 mm -
- Höhe.....225 mm -
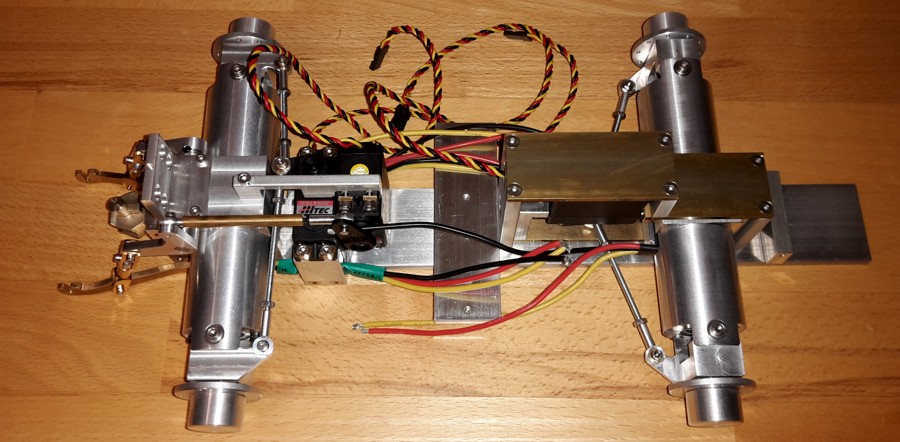
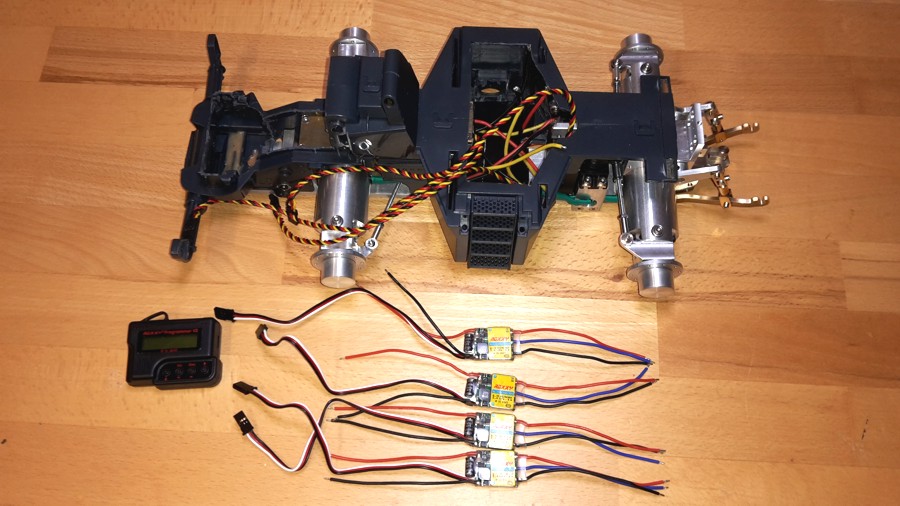
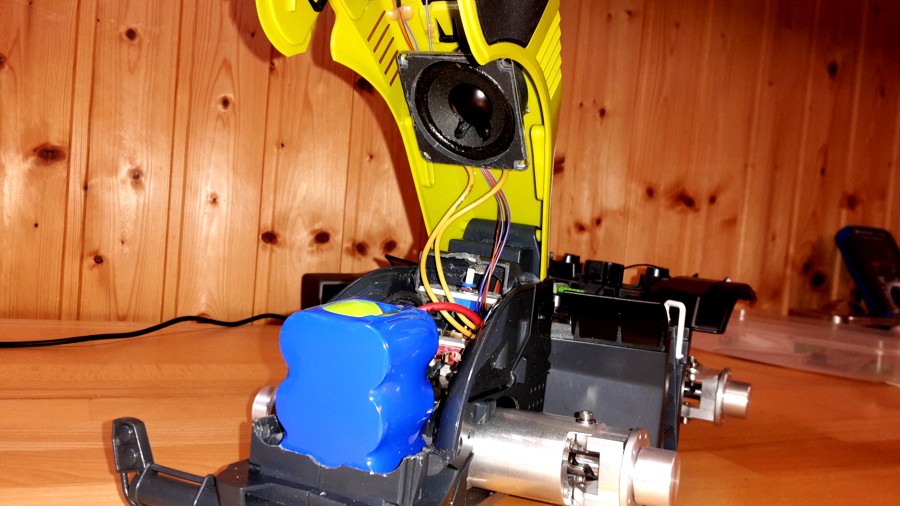
- Antrieb.....4 bürstenlose Getriebemotoren -
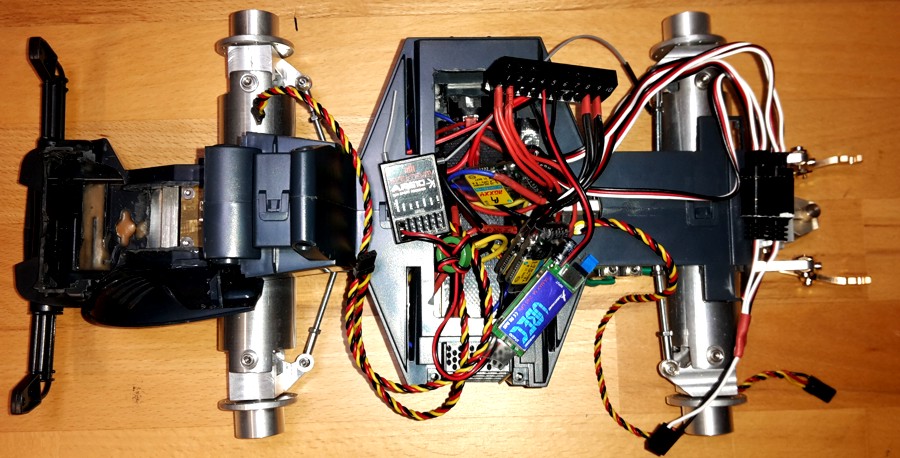
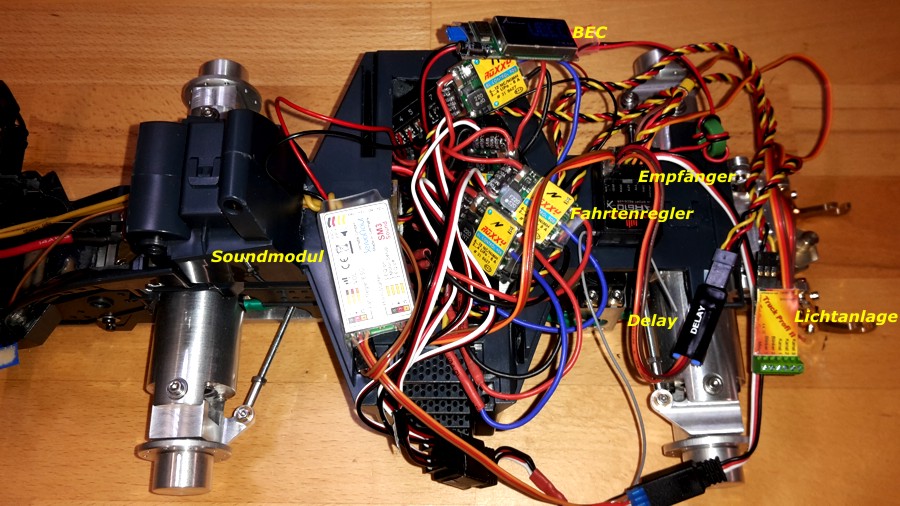
- Vier Fahrtenregler Roxxy 908 -
- BEC.....3A-UBEC mit 3 Ampere Dauerstrom -
- Lenkung.....Front, Heck, Allrad und Hundegang -
- Beide Achsen einzeln lenkbar -
- Drei Servos Hitec 645 MG für Lenkung und Heckkraftheber -
- Heckkraftheber -
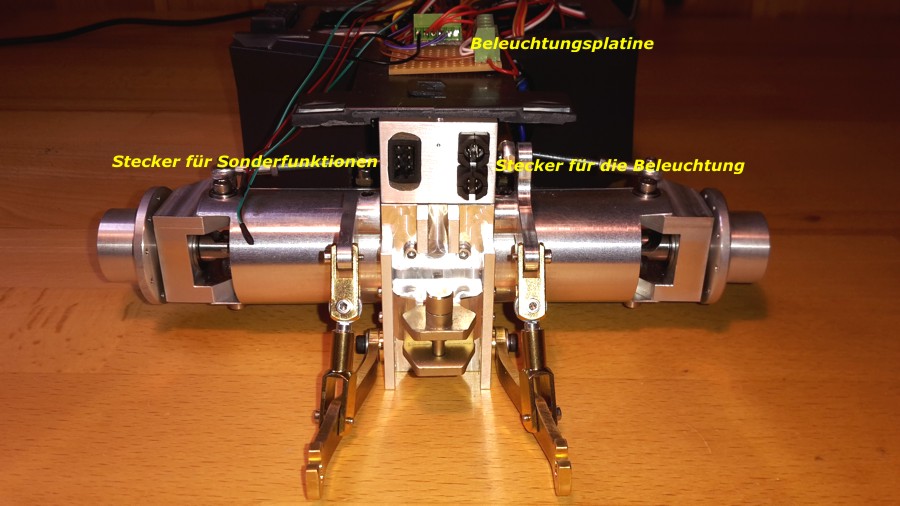
- Lichtanlage.....Truck Profi II von Modellbauregler -
- Soundmodul.....Servonaut SM3 -